04. Finding the Lines: Sliding Window
Implement Sliding Windows and Fit a Polynomial
As shown in the previous animation, we can use the two highest peaks from our histogram as a starting point for determining where the lane lines are, and then use sliding windows moving upward in the image (further along the road) to determine where the lane lines go.
Split the histogram for the two lines
The first step we'll take is to split the histogram into two sides, one for each lane line.
import numpy as np
import cv2
import matplotlib.pyplot as plt
# Assuming you have created a warped binary image called "binary_warped"
# Take a histogram of the bottom half of the image
histogram = np.sum(binary_warped[binary_warped.shape[0]//2:,:], axis=0)
# Create an output image to draw on and visualize the result
out_img = np.dstack((binary_warped, binary_warped, binary_warped))*255
# Find the peak of the left and right halves of the histogram
# These will be the starting point for the left and right lines
midpoint = np.int(histogram.shape[0]//2)
leftx_base = np.argmax(histogram[:midpoint])
rightx_base = np.argmax(histogram[midpoint:]) + midpoint
Note that in the above, we also create
out_img
to help with visualizing our output later on.
Set up windows and window hyperparameters
Our next step is to set a few hyperparameters related to our sliding windows, and set them up to iterate across the binary activations in the image. We have some base hyperparameters below, but don't forget to try out different values in your own implementation to see what works best!
# HYPERPARAMETERS
# Choose the number of sliding windows
nwindows = 9
# Set the width of the windows +/- margin
margin = 100
# Set minimum number of pixels found to recenter window
minpix = 50
# Set height of windows - based on nwindows above and image shape
window_height = np.int(binary_warped.shape[0]//nwindows)
# Identify the x and y positions of all nonzero (i.e. activated) pixels in the image
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Current positions to be updated later for each window in nwindows
leftx_current = leftx_base
rightx_current = rightx_base
# Create empty lists to receive left and right lane pixel indices
left_lane_inds = []
right_lane_inds = []
Iterate through
nwindows
to track curvature
Now that we've set up what the windows look like and have a starting point, we'll want to loop for
nwindows
, with the given window sliding left or right if it finds the mean position of activated pixels within the window to have shifted.
You'll implement this part in the quiz below, but here's a few steps to get you started:
-
Loop through each window in
nwindows -
Find the boundaries of our current window. This is based on a combination of the current window's starting point (
leftx_currentandrightx_current), as well as themarginyou set in the hyperparameters. -
Use
cv2.rectangleto draw these window boundaries onto our visualization imageout_img. This is required for the quiz, but you can skip this step in practice if you don't need to visualize where the windows are. -
Now that we know the boundaries of our window, find out which activated pixels from
nonzeroyandnonzeroxabove actually fall into the window. -
Append these to our lists
left_lane_indsandright_lane_inds. -
If the number of pixels you found in Step 4 are greater than your hyperparameter
minpix, re-center our window (i.e.leftx_currentorrightx_current) based on the mean position of these pixels.
Fit a polynomial
Now that we have found all our pixels belonging to each line through the sliding window method, it's time to fit a polynomial to the line. First, we have a couple small steps to ready our pixels.
# Concatenate the arrays of indices (previously was a list of lists of pixels)
left_lane_inds = np.concatenate(left_lane_inds)
right_lane_inds = np.concatenate(right_lane_inds)
# Extract left and right line pixel positions
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
We'll let you implement the function for the polynomial in the
quiz
below using
np.polyfit
.
# Assuming we have `left_fit` and `right_fit` from `np.polyfit` before
# Generate x and y values for plotting
ploty = np.linspace(0, binary_warped.shape[0]-1, binary_warped.shape[0])
left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]
right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]Take note of how we fit the lines above - while normally you calculate a y-value for a given x, here we do the opposite. Why? Because we expect our lane lines to be (mostly) vertically-oriented.
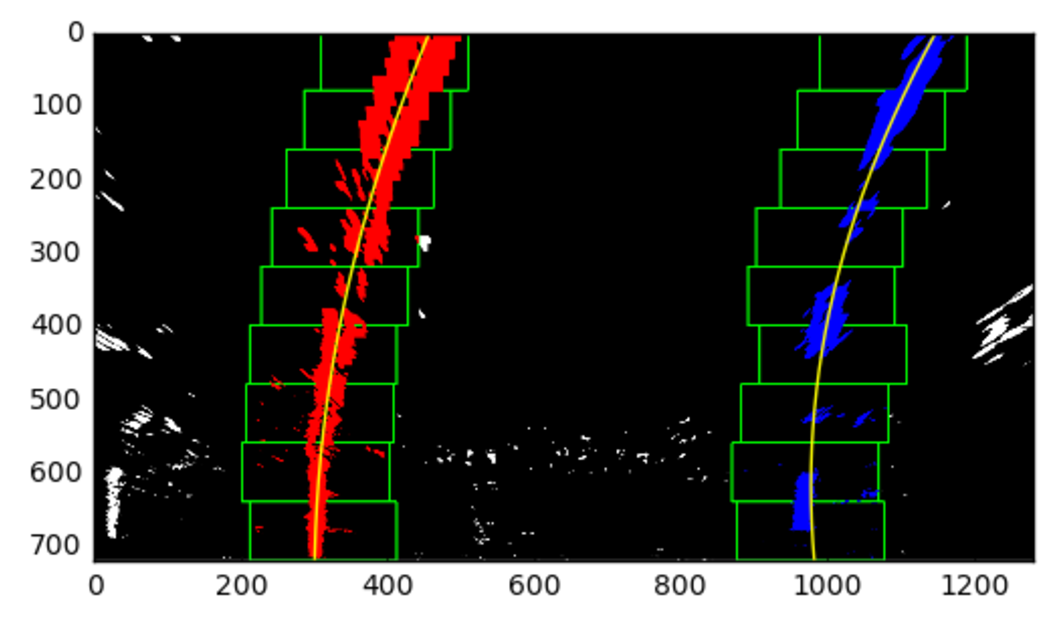
Visualization
Once you reach this point, you're done! But here is how you can visualize the result as well:
out_img[lefty, leftx] = [255, 0, 0]
out_img[righty, rightx] = [0, 0, 255]
plt.imshow(out_img)
plt.plot(left_fitx, ploty, color='yellow')
plt.plot(right_fitx, ploty, color='yellow')
plt.xlim(0, 1280)
plt.ylim(720, 0)Quiz
In the below quiz, implement the following (see
TO-DO
's):
-
Steps 2, 4 and 6 from above within the
forloop infind_lane_pixels()- find the window boundaries, find all pixels within those boundaries, and if there are more thanminpix, slide the window over to the mean of these pixels. -
Fit a polynomial to all the relevant pixels you've found in your sliding windows in
fit_polynomial().
Start Quiz: